在室内环境中,不允许使用GPS信号,因此需要另一个强大的系统来定位UAV。为了构建环境地图,通常使用立体视觉摄像头,来自RGB-D相机的3D原始数据可能会有噪声数据,从而导致3D地图中的障碍物数据不准确。为了防止构建这种不准确的三维地图,我们应用了八叉树过滤方法,从每个2.5D地图中提取特征数据,这些特征点信息可以帮助合并多个地图。具有全局2.5D地图的UGV可以计划其路径以到达其目标位置,而不会与障碍物发生任何碰撞,并且还可以自主导航。
地图构建
每架无人机都构建自己的本地地图,没有任何关于其环境的信息。视觉SLAM通过将Intel RealSense T265和D435跟踪摄像头连接到UAV来执行,如图1所示。

图1 Intel RealSense D435(左)和T265(右)
虽然这些传感器可以创建3D地图,但来自RGB-D相机的原始数据由于障碍物反射而存在噪声和误差。由于机器人系统必须响应传感器的噪声和不断变化的环境,因此应用了八叉树过滤器来创建八角图。八角图由占用或空闲的节点组成,称为叶子。图2显示了带有RGB和八角图的点云的3D数据。
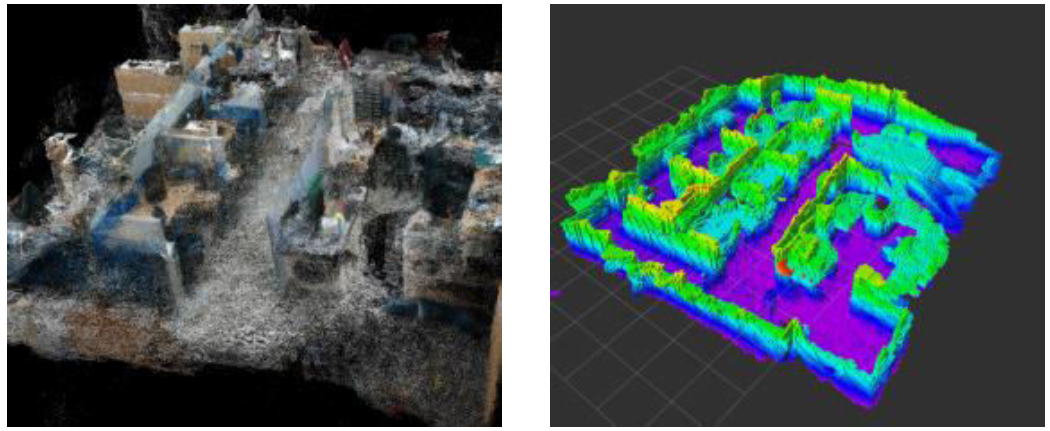
图2 点云图(左)和八角图(右)
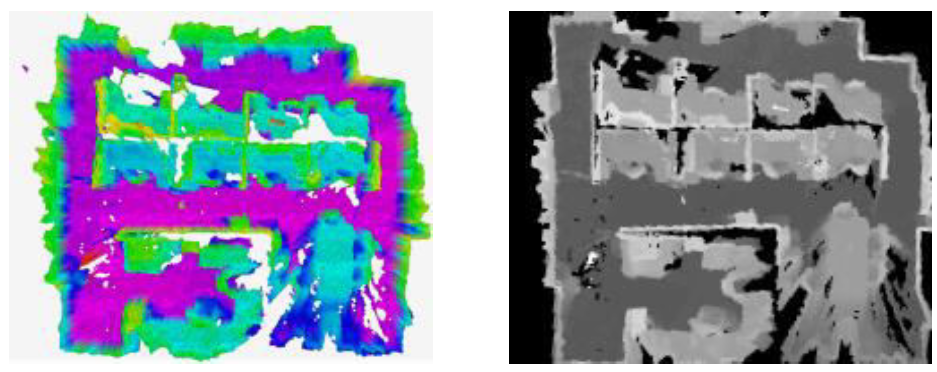
单独构建的3D本地地图需要转换为2.5D。3D八角图也可以合并,但3D体素匹配过程非常耗时。2.5D就像一个包含x、y 和最高z数据的高度图,因此生成的图像将是灰度图像。灰度图像的像素数据表示三维地图的高度信息。图 3显示了八角图中的体素数据以及转换为2.5D的地图。
图3 将 3D 数据转换为灰度的2D图像
地图合并
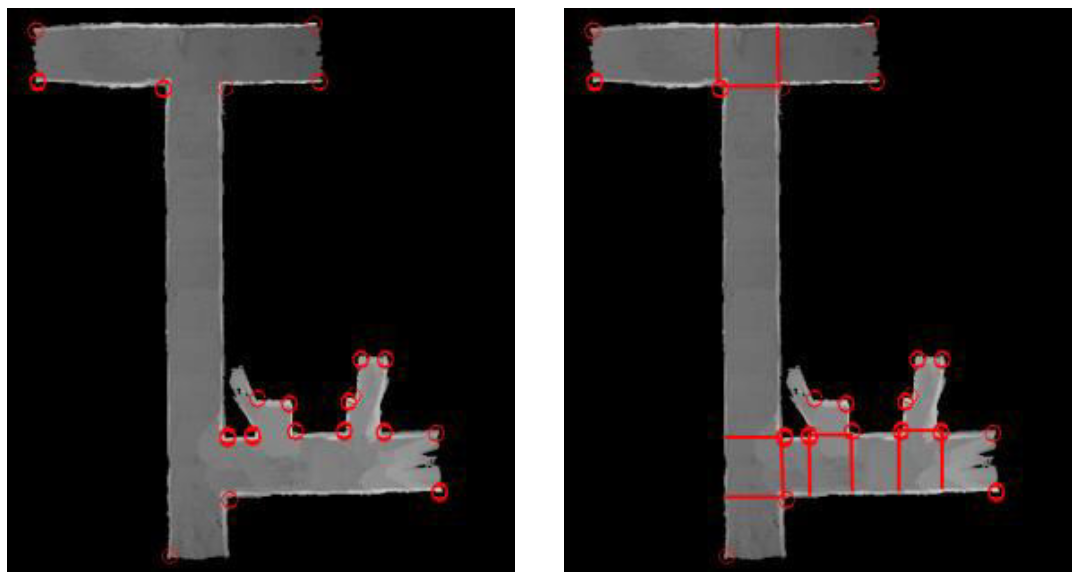
合并每架无人机的2.5D地图以构建全球地图。在这项工作中,提取了可以在室内环境中检测到的特征点。我们利用Harris角检测算法提取角点,提取代表走廊宽度的墙的相对点。图4显示了从 2.5D中提取的角点和走廊宽度。走廊的宽度可以用线表示,因此我们可以通过匹配线尾的这些点来合并许多地图。
图4 从2.5d地图(左)和周围走廊宽度(右)中提取特征点
八角图建筑
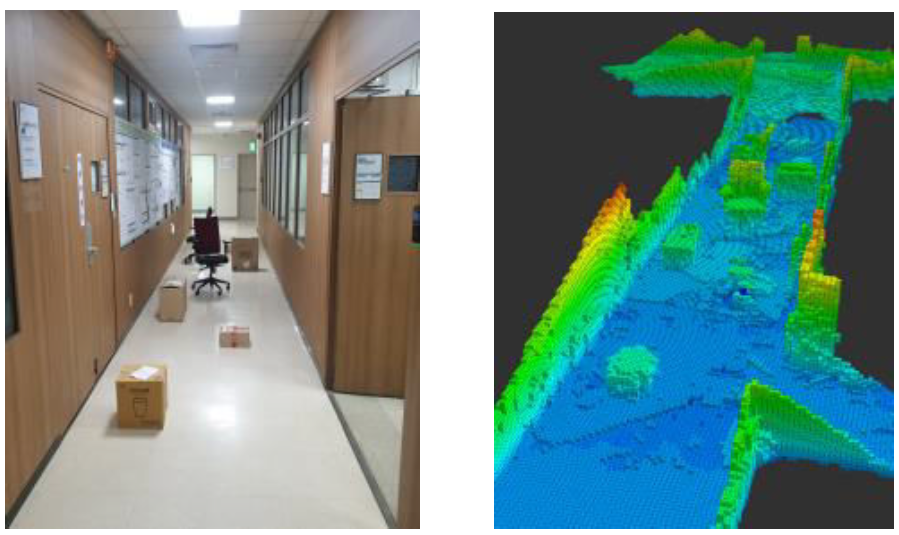
全局地图分为三个局部地图,每个局部地图都是用RGB-D相机从鸟瞰图构建的。实验在55??? × 13.5???场地进行,我们放置了一些由椅子和箱子组成的障碍物,如图4所示,并构建了分辨率为0.05m的三维八角图。实验环境和3D八角图如图5和图6所示。
图5 实验环境(左)和八进制图(右)
图6 三种不同的本地八角图与障碍物
转换为2.5D和地图合并
2.5D地图由像素值组成,包括 x、y 和高度数据,可以表示为灰度图像。由于八角图有环境的3D数据,我们可以降级八角图以获得2.5D地图。此外,由于八角图的每个体素都是以0.05m的分辨率构建的,因此我们可以获得走廊的宽度或障碍物的位置。图7显示了从八角图转换而来的每个2.5D地图。每个贴图都需要预处理以消除噪点效应。合并后的地图如图8所示。
图7 从八角图转换后的2.5D地图
图8 合并后的地图
提出了一种从多个无人机构建全球地图的协作方法。无人机的RGB-D摄像头可以采集3D环境数据构建地图。构建3D地图后,八角图在灰度图像中转换为2.5D,以轻松合并大量地图。实验结果通过提取特征点和与描述符的点匹配,从三张局部地图中得到一个大型全局地图。
源自:2021 The 21st International Conference on Control, Automation and Systems (ICCAS 2021) Ramada Plaza Hotel, Jeju, Korea, Oct. 12~15, 2021








 •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
• 