


“产品定义”概念说明
产品定义是产品开发中的关键概念,指在设计和研发阶段前,对产品的功能、性能、目标用户、应用场景及技术规格等进行明确的规划与框架设定。它是产品从概念走向现实的基础,也是开发流程的起点。
具体而言,产品定义涵盖以下内容:
目标市场与用户需求:明确产品面向的市场和需满足的核心用户需求。
核心功能与性能:描述产品的关键功能及性能指标。
技术规格与约束条件:制定产品的技术要求,例如尺寸、重量、功耗等。
应用场景与任务目标:说明产品在典型使用中的场景及预期任务。
差异化优势:阐明产品在竞争中的核心优势和独特价值。
在技术性强的产品开发中(如无人直升机),产品定义尤为重要。它不仅为研发团队提供明确的设计方向,还为市场、生产和销售等相关团队奠定了共同理解的基础。通常,产品定义工作由接触客户需求较多、同时具备技术与产品背景的解决方案团队主导完成。
1.需求概述
中国海域总面积约473万平方千米,拥有大小岛屿7600余座,广阔的海域为低空经济发展提供了重要空间。目前,海域内主要活跃的运营主体包括各类民用船舶、军事舰船以及海上油气平台。大多数军事舰船和大吨位民用船舶通常配备船载直升机,以执行多样化的海上任务,提升船舶的应急响应能力。然而,由于船载直升机对起降场地要求较高、续航时间有限、任务半径较小,且存在一定的人员伤亡风险,其实际海上飞行作业较为受限,利用率因此相对较低。

图1 俄罗斯某型极地科考船搭载的多用途直升机
随着陆基无人直升机技术的成熟及应用市场的拓展,船载多用途无人直升机已具备适应性改进、任务执行和装备部署的基本条件。未来不仅可用于我国海域与陆地之间的任务往返,还可随船出海,执行全球范围内的海域及近海任务。作为低空经济发展的重要载体,船载多用途无人直升机有望在国际低空领域展现强大的竞争力与广阔的应用前景。
下图为世界航运密度热图,展示了民用船只航行密集的区域和线路。这些密集区域将成为船载多用途无人直升机系统的重点应用区域。
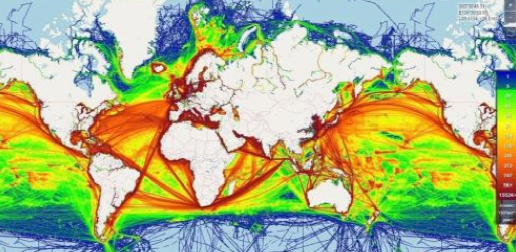
图2 世界航运密度热图
2.现状分析
万哥深耕直升机及无人直升机研发十余年,主持多个船载无人直升机科研项目,专注平台与系统的研发验证。截至2024年12月,我国尚无完成定型鉴定并投入批量装备的民用船载多用途无人直升机。为满足海上侦察、执法驱离、通信中继、环境探测、搜救和物资运输等需求,曾尝试船载弹射起飞固定翼无人机、垂直起降固定翼无人机、多旋翼无人机及系留无人机等多种构型,但因普遍存在坠海或回收困难等问题,难以替代船载无人直升机。

图3 某型船载垂直起降固定翼无人机海上飞行测试
国内从事无人直升机研发的整机企业不少于30家,多数专注于飞行平台的系列化研发及可靠性改进。部分企业在军事、消防救援和物流运输领域有所探索,但船载多用途领域的研究较为有限,主要停留在理论研究和起降测试阶段,与实际应用仍存在较大差距。

图4 某国产船载多用途无人直升机进行海上起降试验
为促进低空产业健康发展,万哥结合多年产品研发、技术攻关和产品定义经验撰写本文。希望借此抛砖引玉,为从事该领域研发、解决方案设计及市场推广的相关人员提供启发和参考。
3.应用需求
常见的民用船只包括渔船、客船(邮轮、客货混装轮)、货船(集装箱船、散货船、油轮、滚装船等)、工程船(海上工程船、挖泥船、起重船)、科考船、救援船及执法船(海监、渔政、海事、海警、海关等)。不同类型的船只在使用类型和运行海域上存在较大差异。
根据民用船只的分类,船载多用途无人直升机可应用于以下15类需求:
1)海洋气象探测:监测云层、降雨、低空风场、温湿度、洋流及波浪情况;
2)渔业资源调查:探测鱼群位置和生活环境,为捕鱼及渔业保护提供参考;
3)海上搜索救援:针对落水人员,进行广域巡查搜索并投放救生装置;
4)海上平台应急处置:对出现事故的海上平台,实施空中侦察测绘和事故处置;
5)海洋环境探测及污染调查:探测海洋漂浮物、水质和空气污染;
6)海上侦察及海事巡检:远程海上侦察和活动巡查;
7)海上执法及调查取证:追踪可疑船只,空中取证和执法驱离;
8)航标巡检及航道测绘:巡检海上航标健康状态并进行水面及水下航道测绘;
9)海上物流运输:船、岛、陆地间的物流运输和紧急物资保障;
10)海上通信保障:提供海上应急通信及无人机通信中继保障;
11)海上电子侦察及干扰反制:识别并干扰非法信号;
12)商船护卫:护航商船并采用非杀伤性方式驱离海盗;
13)科考船空中支援:支持极地及海洋科考船空对海探测和科考设备吊运、回收;
14)空中护航:为特种船只或重要物资提供对空对海警戒、诱饵播撒及无线电对抗;
15)岛礁及近海巡察:巡查岛礁、近海区域并处置违法活动。
4.研制难点
万哥结合多年在船载直升机/无人直升机领域的研究与课题验收经验,以及国内外的应用实例,总结出以下15条研制难点,供无人直升机整机及配套企业参考:
1)狭小空间停放:载重能力相当的情况下,旋翼及机体尺寸尽可能小,桨叶和尾梁可折叠,方便与船载有人直升机共用存储空间;
2)船载起降平台适应:可在25节航速及一定横摇纵摇角度下精确起降并快速固定;配置鱼叉-格栅或RAST辅助降落系统;
3)精准定位与控制:支持北斗差分、图像识别及红外定位,具备高带宽姿态控制能力;
4)发动机性能:具备高功重比、低油耗、长续航和海洋环境适应能力;
5)旋翼操控:具备短时间大功率高机动操纵能力,支持负升力抗风起降;
6)快速转运:降落后可快速系留并转运至机库内存储固定;
7)应急定位与水上漂浮:加装水面及水下应急定位装置,配置应急浮囊;
8)紧急迫降控制:支持自转下滑迫降及发动机空中重启或紧急电驱旋翼转动;
9)高安全性起落架:抗高海况下垂直冲击且满足侧风抗倾覆能力;
10)多波段通信:支持多频段微波链路、宽带卫通、窄带卫通及北斗短报文测控,具备通信设备自适应和跳频抗干扰能力;
11)超远程控制能力:具备超视距自主飞行能力、北斗短报文远程测控能力;
12)简易保障系统:燃油、供电、系留等系统与船载直升机兼容,最小化船只改动;
13)任务载荷集成:具备高功率载荷供电及多任务载荷接口,可实现任务构型快速配置;
14)多机协同作业:配置中继组网链路及协同控制器,具备多机协同及编队飞行安全能力,并支持有人-无人协同和空地、空海跨域协同;
15)环境适应性:整机进行三防设计,适应海上湿热和高腐蚀性盐雾环境;具备七级以上起降抗风能力和十级以上空中抗风能力;具备强电磁屏蔽和抗干扰能力;具备大雨起降、暴雨飞行和防雷击能力;具备极地低温环境和热带沙漠高温环境正常飞行能力;具备峡谷、城市街区、林间空地自主避障和高机动飞行能力;具备海上超低空飞行和悬停能力。

图5 美国MQ-8C舰载无人直升机舰面系留状态
5.系统组成
船载多用途无人直升机系统主要包括以下8部分:
1)船载多用途无人直升机飞行平台;
2)多用途任务载荷设备;
3)船载及机载多模式多频段通信链路系统;
4)着船引导系统;
5)船载辅助起降系统;
6)船载控制站及便携式控制站;
7)船载综合保障系统;
8)陆基运输保障车。
6.飞行平台要求
以下为根据某民用船舶多用途无人直升机项目提炼的飞行平台要求,仅供参考。
(一)主要功能要求
1)具备移动平台自主起降功能;
2)具备自主航线飞行功能和手动增稳控制功能;
3)具备一键着车、一键起降、一键悬停、一键爬升及下降、一键盘旋等自动化功能;
4)具备根据光电吊舱识别目标进行移动目标跟踪飞行功能;
5)具备指点飞行功能和自动返航功能;
6)具备无链路自主飞行和电磁静默飞行功能;
7)具备压力加油功能和重力加油功能;
8)具备悬停状态下放加油管进行悬停加油能力和空中移动跟随加油功能;
9)具备非载船异地起降控制功能;
10)具备旋翼刹车及发动机空中灭车及重启功能;
11)具备长时间纯惯性飞行功能;
12)具备多机中继组网能力和远距离超低空悬停作业能力。
(二)尺寸及重量要求
1)最大起飞重量:≤1000kg;
2)主旋翼直径:≤9m;
3)最大有效载荷:≥350kg;
4)尾梁、桨叶可快速折叠并固定(机库内存放);
5)机库存放尺寸(长×宽×高):≤5.2m×2.2m×2.4m;
(三)性能指标要求
1)最大飞行速度:≥220km/h;
2)巡航速度:120~180km/h;
3)最大起降海拔:≥4000m;
4)实用升限:≥6000m;
5)海上最低巡航飞行高度:≤20m;
6)海上最小稳定悬停高度:≤10m;
7)续航时间:≥4h(载重350kg),≥8h(载重150kg);
8)单次最大悬停作业时间:≥2h;
9)最大航程:≥1100km(满油,最大起飞重量);
10)任务半径:≥150km(视距链路),≥400km(机载卫通);
11)发动机剩余功率:≥20%(最大起飞重量状态,ISA+25℃,海拔1000m);
12)满载状态最大垂直爬升速度:≥4m/s;
13)满载状态最大斜爬升速度:≥6m/s;
14)满载状态最大斜下降速度:≥4m/s;
15)满载状态最大侧向飞行速度:≥24m/s;
16)满载状态最大水平加、减加速度:≥2m/s2;
17)自主起降阶段最大允许船速:≥25节;
(四)机载设备配置要求
1)机头前方配置导引摄像头和高亮探照灯;
2)机体配置下向、前向及侧向毫米波测距雷达;
3)机腹配置下向视觉导引系统和精确对准系统;
4)配置下向双光摄像头及起降照明系统;
5)尾梁或尾翼上配置广角监控摄像头用于自身状态监视;
6)配置ADS-B航管应答机实现融合空域安全飞行;
7)配置北斗短报文用于应急窄带测控;
8)配置北斗应急定位信标(含水上+水下);
9)配置黑匣子(耐高温高压、可自动脱离)记录飞行数据;
10)配置旋翼刹车及轮式起落架刹车装置;
11)机腹下方配置声光告警装置,出现故障及迫降时进行声光提示;
12)机身两侧配置应急浮囊,支持漂浮时间≥24h;
13)采用激光惯导+北斗双天线组合导航系统,配置电加热除冰空速管及大气数据机。
(五)环境适应性要求
1)抗风等级:船载起降7级,空中抗风10级;
2)防雨等级:大雨起降,暴雨飞行;
3)工作温度:-45℃~60℃;
4)整机具备防湿热、防霉菌、防盐雾能力;
5)整机满足海上直升机电磁兼容性要求;
6)起落架系统满足相对下沉速度≥3.05m/s的着舰冲击能量,且不会发生永久变形;
7)船载自主起降要求:横摇≤±5°(周期≥10s),纵摇≤±2°(周期≥7s),迎面风速≤30m/s时,可于船载自主起降。
(六)载荷适配要求
1)载荷供电功率:≥8000w(DC28V);
2)具备多载荷集成能力,可同时搭载光电吊舱、高清正射相机、小型多功能雷达、多光谱相机、强声强光吊舱、无线电人员搜救载荷、船舶识别AIS系统、多点救援物资投放装置、电动绞车、垂投灭火装置、水平喷射灭火装置、吊挂投放装置等;
3)机腹空间满足搭载封闭式医疗救援舱的要求,救援舱支持固定挂载、快速抽放、吊挂挂载、绞车挂载等多种挂载方式,救援舱具备姿态、航向自动增稳控制能力,救援舱内配置通风、加热、供氧、输液、生命体征监测、可视对讲等设备;
4)机腹可挂载多枚垂直投放灭火弹,也可搭载灭火剂药箱、电动增压泵、消防炮、喷管及电动调节喷头、破窗器等灭火设施;
5)机腹可挂载吊挂投放装置,具备物资吊运及物资投放功能。
(七)船载适配要求
1)机腹配置电动鱼叉助降系统,可与载船上的格栅装置配合使用;
2)无人直升机及甲板配置动动差分北斗定位及甲板姿态位置测量系统;
3)甲板配置近距离着舰引导定向链路;
4)机身两侧及起落架配置甲板及机库内系留固定的接口;
5)旋翼桨叶及尾梁可快速折叠并固定;
6)机库内配置任务载荷设备存储箱和载荷更换拖车;
7)机库内配置压力加油装置和便携式电源车;
8)机库内配置淡水高压重新及高压气清洁装置。
(八)其他要求
1)发动机类型:涡轴/重油活塞式/重油转子发动机;
2)燃料:航空煤油/普通船用柴油;
3)燃油系统采用防爆防穿刺设计,与发动机等高温部件配置防火隔离板;
4)整机优先采用复合材料整体结构,具有较强的刚度强度和防腐蚀性能,并进行防水和排水设计;
5)整机金属部件进行防腐蚀设计和防松设计;
6)其他质量通用性要求。
7.任务载荷类型及要求
船载多用途无人直升机具有强大的多任务载荷搭载能力,可根据任务需求灵活配置不同载荷设备,从而赋予无人直升机特定的任务能力,实现一机多用,高效执行各类海上作业。
主要可集成的载荷设备包括:光电吊舱、高清正射相机、小型多功能雷达、多光谱相机、强声强光吊舱、无线电人员搜救载荷、船舶识别AIS系统、多点救援物资投放装置、电动绞车、垂投灭火装置、水平喷射灭火装置、吊挂投放装置等。
每类任务载荷设备的要求涵盖功能、性能参数、尺寸、重量、功耗、环境适应性及接口协议等方面,具体细节此处不再详述。
8.通信系统要求
船载多用途无人直升机需满足海上及船载复杂电磁环境的使用要求,为确保通信可靠,建议采用以下配置:
多波段中继组网:采用C+L+U多波段链路,实现测控及图像传输的可靠保障;
远距离超低空及超视距作业:配置机载卫星通信设备,支持宽带数据传输,采用抛物面天线卫星通信设备,可安装在旋翼下方机头、尾梁位置或旋翼主轴顶部;
多模式通信支持:可选配窄带卫星通信(如天通大S)、北斗短报文、4G/5G、ADS-B及机载AIS系统,实现空空与空海平台的全面联通。
9.船载控制站要求
船载控制站主要由固定式控制站、便携式控制站和手动控制器组成。船载通信系统需部署在控制站外部的上层建筑顶部,以实现更远距离的数据传输与测控功能。船载控制站不仅负责无人直升机的起降和任务飞行控制,还需具备对任务载荷设备和通信系统的监控、数据分析功能,并能够与指挥中心保持联络。
10.船载保障系统要求
基于现有船载直升机的保障要求,针对船载多用途无人直升机的特点,应配备适合其使用需求的保障设备和设施,包括机库系留存储、甲板系留固定、载荷存储、加油、加液、清洗、干燥、充电、甲板及机库转运,以及着船引导设备。所有设备设施需根据无人直升机的接口规范进行配置,并满足其船载起降及海上多任务执行的能力要求。
本文为民用船载多用途无人直升机产品定义的概览版本,并非完整定义。具体产品定义和解决方案需根据不同应用场景及产品特点进行针对性设计。
如对本文内容感兴趣并希望进一步交流,欢迎留言至万哥邮箱:sunwan248@163.com。请在邮件中附上您的单位名称、姓名、联系方式(电话及微信号)及需求简述,以便我们及时回复。


 •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
• 